CONTROLADORES DE MOTOR A DETALLE (PRÁCTICA VOLUNTARIA)
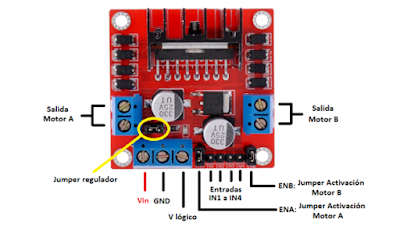
Este controlador de motor permite, como bien dice el nombre, controlar dos motores de corriente continua y motores paso a paso de no mas de 2 amperes, existen algunos módulos disponibles para la compra que ya vienen con el driver soldado y algunos pines para controlar las entradas y las salidas. Las salidas más importantes son las siguientes: - ENA: Esta salida permite controlar la velocidad del motor A - IN1 e IN2: Estas dos salidas permiten controlar el sentido de giro del motor A - ENB: Esta salida permite controlar la velocidad del motor B - IN3 e IN4: Estas dos salidas permiten controlar el sentido de giro del motor B Aquí os dejo un vídeo que os explica muy bien el funcionamiento de este driver: https://www.youtube.com/watch?v=c0L4gNKwjRw&t=429s

